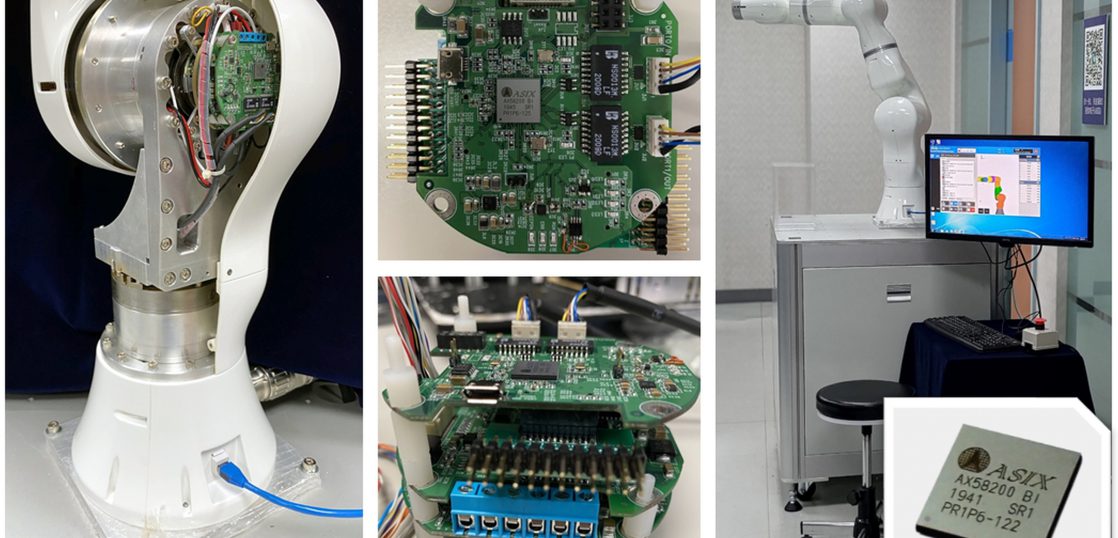
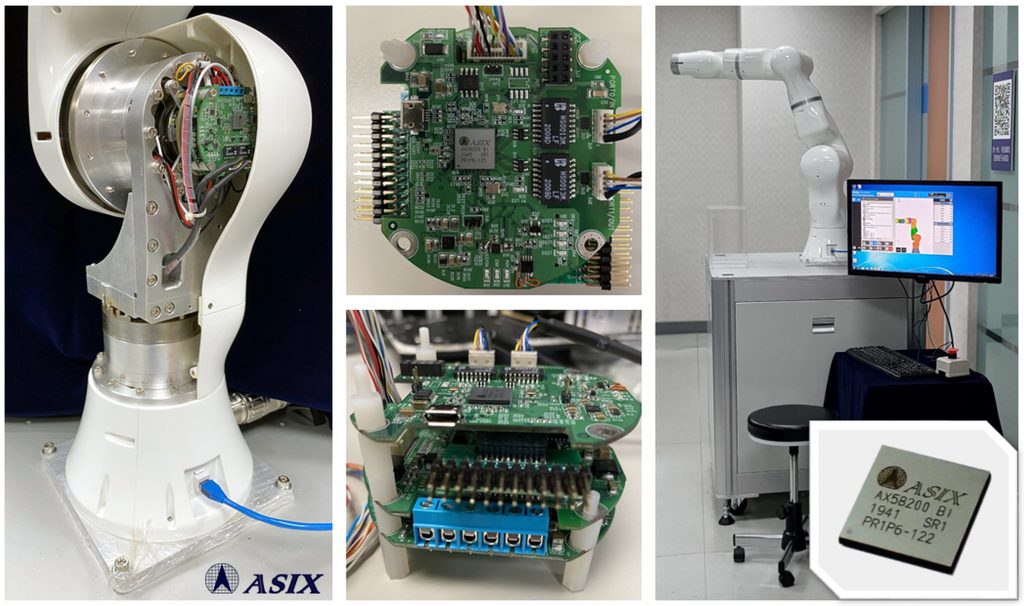
エーシックス社製AX58200 AxRobot EtherCATスレーブサーボドライブモジュラ設計を使用して、各ロボットアームジョイントのモータードライブボードのPCBスペースとハードウェア設計コストを効果的に削減します。
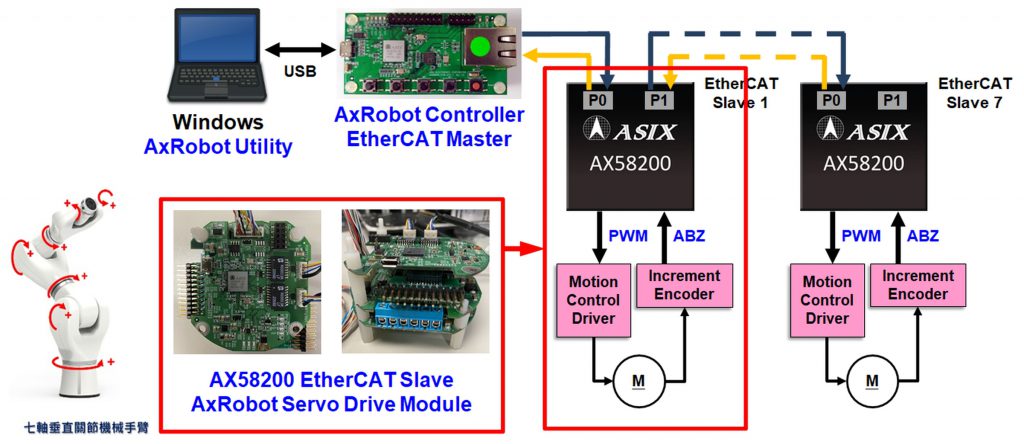
世界中の製造業界における人と機械間のヒューマンロボットコラボレーション(HRC)に対する高いニーズに応えエーシックス社は、2019年にAX58200(2/3ポートEtherCATスレーブコントローラーSoC)を発売し、産業用イーサネット/EtherCAT協働ロボット技術の研究開発に積極的に投資しています。 本日エーシックス社は、AX58200をベースとした費用効果の高いAxRobot EtherCAT 7軸フォースアシスト制御ロボットソリューションを発表しました。 設計者は、EtherCATマスターとして機能するAxRobotコントローラーとEtherCATスレーブデバイスとして機能する7つのAxRobotサーボドライブモジュールを備えたAxRobot EtherCAT 7軸フォースアシスト制御ロボットを使用して、AxRobotソフトウェアのフォースアシスト制御ロボットの機能を簡単に評価できます。 このソリューションは、スマートな製造協働ロボットアプリケーションに適しています。
AxRobot EtherCAT 7軸フォースアシスト制御ロボットソリューションは、AX58200を用いたAxRobotサーボドライブモジュラ設計を利用して、各ロボットアームジョイントのモータードライブボードのPCBスペースとハードウェア設計コストを効果的に削減します。 EtherCATデイジーチェーンネットワークトポロジ技術を使用してAxRobotコントローラとAxRobotサーボドライブモジュール間で通信することにより、すべてのロボットアームジョイントを簡単に順番に配線できます。 各ロボットアームジョイントで最も簡単なネットワーク配線を提供し、機器のメンテナンスの難しさを軽減します。
通常協働ロボットには、人とロボットとの協働機能を実現するための外部接触力情報を取得するための力センサースキンが装備されています。 AxRobot EtherCAT 7軸フォースアシスト制御ロボットソリューションは、特別に高価なフォースセンサースキンを装備する必要がなく、協働ロボット機能を実現するための外力フィードバックコントローラをサポートします。 突然の外力衝突イベントを検出しながら、緊急時にロボットアームの動作を停止し、エラーアラームメッセージを送信して、近くのオペレーターの安全を確保できます。
エーシックス社は、設計者がAxRobotソフトウェアのフォースアシスト制御ロボットの機能を簡単に評価できるように、AxRobot EtherCAT 7軸フォースアシスト制御ロボット開発キットを提供しています。 さらに、AxRobot EtherCAT 7軸フォースアシスト制御ロボットソリューションのエンジニアリング設計サービスも提供しています。 加えて顧客に専門的でタイムリーな技術サービスを提供する優れたエンジニアリングチームがあります。 詳細については、下記お問い合わせフォームよりお問い合わせください。